차선(lane marking) 검출 알고리즘
1. 먼저 Canny Edge detector와 같은 알고리즘으로 Edge를 검출한다. (Edge는 직선이 아님을 기억하자)

2. 그리고 위의 Edge에 해당하는 Point(x,y)에 대해서 Hough Transform 변환을 하여 직선을 찾아낸다.
방법은 간단하다. Hough Transform은 직선의 방정식 (e.g. Y = aX + b)를 a, b의 좌표계에서 하나의 점을 변환한다.

즉, 위에서 왼쪽 좌표계의 직선은 오른쪽의 3번으로 표현 가능하다.
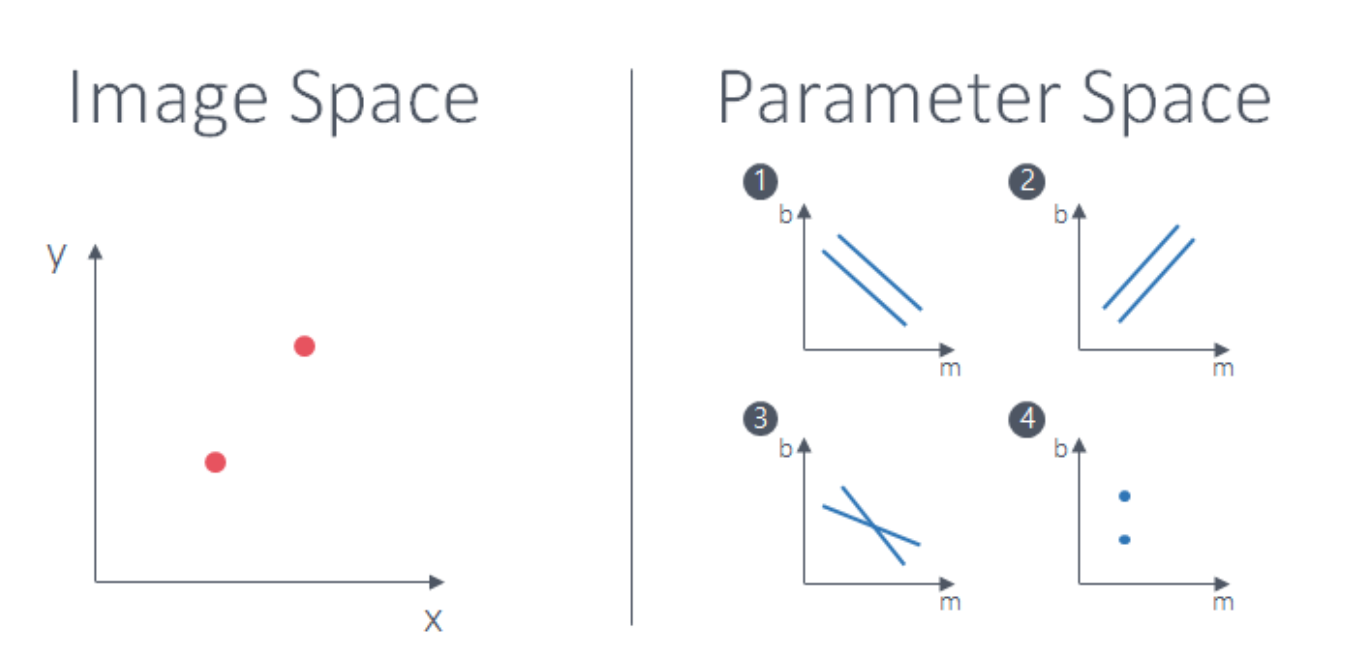
위에서 좌측 두점은 오른쪽 3번으로 표현이 가능하다.
자, 그러면 위의 Edge들 상의 점들을 오른쪽의 Parameter Space로 옮겼다고 가정하자. 수많은 직선들이 있을 것이다. 그 직선들 가운데 많이 교차되는 지점들을 찾으면 해당 지점들이 차선 후보군이 되는 것이다.
m.blog.naver.com/windowsub0406/220894462409
[Udacity] SelfDrivingCar- 2-3. 차선 인식(hough transform)
Python3.5 그리고 Opencv 3.1 기준 코드 작성 셋팅만 제대로 됐다면 복붙만해도 문제없이 돌아갈 것이다....
blog.naver.com
blog.naver.com/PostView.nhn?blogId=windowsub0406&logNo=220894160982
[Udacity] SelfDrivingCar- 2-2. 차선 인식(Edge)
Python3.5 그리고 Opencv 3.1 기준 코드 작성 셋팅만 제대로 됐다면 복붙만해도 문제없이 돌아갈 것이다....
blog.naver.com